綺麗な図を描かせたい、俺以外のやつに
有給消化中の自由研究として、オリジナルの文書管理システムを作っている。今回のテーマは「Full Rust 実装(Web フロントエンドも含む)」「文書の有向グラフ化による依存関係分析」「画像をサポートしないことによるフルテキスト化」で、今のところはまあまあうまく動いている。RBAC 周りやセキュリティ実装をちゃんと詰めたら、知り合いにクローズド公開するつもり。
さて、画像をサポートしないとはいっても、技術文書を扱う以上 Figma DSL や Mermaid は当然レンダリングできないと困る。画像が嫌なのであって、図は当然大事。
最初は beautiful-mermaid で何とかなるだろうと思っていたが、思ったほど満足できなかったので自作することにした。
今回はその中でも、特に C4 Model のレンダリングについて書く。
C4Modelとは
Section titled “C4Modelとは”ソフトウェアアーキテクチャを視覚化する手段として、Simon Brown が提唱したC4Modelは広く普及している。C4 図を描くツールとしては Structurizr、C4-PlantUML、Mermaid.js が代表的で、まあそれなりにデファクトな仕様として扱ってもよかろうと判断している。
C4Modelは4つの抽象レベルでソフトウェアアーキテクチャを記述する。
| レベル | 描画対象 | 典型的なノード |
|---|---|---|
| Context | システムとその外部利用者・外部システム | Person, Software System, External System |
| Container | システム内部のデプロイ単位 | Web App, API, Database, Message Queue |
| Component | コンテナ内部の構成要素 | Controller, Service, Repository |
| Code | コンポーネント内部のクラス・関数 | (通常は UML に委譲) |
どれも技術ドキュメントでは有用。
mermaidでのC4の扱い
Section titled “mermaidでのC4の扱い”技術ドキュメントの文脈では、GitHub でそのまま見られることもあって Mermaid が第一選択になりやすい。Mermaid は最終的なノード配置とエッジルーティングを種別ごとに個別の外部プロジェクトへ委ねており、現在の C4 レイアウトには Dagre を使っているらしい。
もっとも、今回の記事はその出力が気に入らないので自作する、という話である。Dagre 自体の思想や品質についてどうこう言いたいわけではなく、単に好みの問題だと思ってほしい。
Layered Graph Drawing の基礎理論
Section titled “Layered Graph Drawing の基礎理論”ここからは、どのようなアルゴリズムでレンダラを実装したかを書いていく。今回の実装は C4 Component 図に特化しているが、Context や Container もだいたい同じアルゴリズムで描画している。Code については別実装にしているが、あちらはそこまで複雑ではないので今回はあまり触れない。
C4図のレイアウトは、グラフ描画の古典的手法であるlayered drawing(Sugiyama framework)をベースにしている。まず基礎理論を整理する。
1. Sugiyama Framework(1981)
Section titled “1. Sugiyama Framework(1981)”Sugiyama, Tagawa, Toda は 1981 年の論文で、有向グラフを層状に描画する 4 段階のフレームワークを提案した。
- Cycle Removal — 閉路を除去して DAG にする
- Layer Assignment — 各ノードを離散的な層(rank)に割り当てる
- Crossing Minimization — 各層内のノード順序を決め、層間のエッジ交差を最小化する
- Coordinate Assignment — 各ノードに具体的な座標を割り当てる
2. Gansner et al.(1993)
Section titled “2. Gansner et al.(1993)”Gansner, Koutsofios, North, Vo は Graphviz の dot アルゴリズムの基礎となる論文で、Sugiyama framework を実用的に拡張した。
- Network Simplex による rank assignment — 最適な層割り当てを線形計画法の双対として解く
- Median/Barycenter heuristic による crossing minimization — 隣接層のノード位置の中央値・重心で暫定順序を決定
- Network Simplex による coordinate assignment — x 座標を最適化
この論文が定めた「rank → order → coordinate」の 3段分離は、今日のほとんどのlayered drawing実装の基盤になっている。
グラフとみたときの処理段階の整理
Section titled “グラフとみたときの処理段階の整理”直感的な理解のため、一旦整理してみる。
次のような単純な依存グラフを考える。
A → B → DA → C → DLayer Assignmentで表現すると、A は入次数 0 なので最上層、D は出次数 0 なので最下層に割り当てられる。B と C は A と D の間のノードなので中間の層に割り当てられる。
Layer 0: ALayer 1: B, CLayer 2: DCrossing Minimizationでは、Layer 1 の B と C の順序を決める。A→B, A→C はどちらも Layer 0 の A から出るので交差しない。B→D, C→D はどちらも Layer 2 の D に入るので交差しない。この例では B, C のどちらが左でも交差は 0 だが、より複雑なグラフでは barycenter heuristic が効く。
Layer 0: ALayer 1: B, C (Barycenter: 0.5, C: 0.5)Layer 2: DCoordinate Assignmentで、各ノードに x, y 座標を割り当てる。y は layer index に比例、x は crossing を最小化した順序に基づくが、エッジ長を最小化するよう調整される。
A (x=0, y=0)B (x=-1, y=1)C (x=1, y=1)D (x=0, y=2)計算量について
Section titled “計算量について”| 段階 | 最適解の計算量 | 実用的手法 |
|---|---|---|
| Layer Assignment | NP-hard(一般) | Network Simplex: O(VE) |
| Crossing Minimization | NP-hard | Barycenter + swap: O(層数 × 反復回数 × V) |
| Coordinate Assignment | O(VE) | Network Simplex or Brandes-Köpf |
通常、ドキュメントに載せるくらいの規模なら 10〜50 ノード程度なので、これらの計算量が問題になることはまずないだろう。
Compound Graph — 入れ子境界の扱い
Section titled “Compound Graph — 入れ子境界の扱い”C4 図の最大の構造的特徴はboundaryによる入れ子(compound graph)である。これは通常のlayered drawingにはない追加の複雑さを持ち込む。
入れ子構造を持つグラフは、単純なDAGとは異なり、ノードが他のノードを包含する階層構造を持つ。これにより、レイヤー割り当てや交差最小化のアルゴリズムが複雑になる。
Compound Graph
Section titled “Compound Graph”Compound graph は、通常のグラフ G = (V, E) に加えて 包含関係 T ⊆ V × V を持つ。T は木構造を成し、(p, c) ∈ T は「ノード p がノード c を包含する」ことを意味する。
C4 図では boundary が包含ノードに対応する。
Enterprise_Boundary(eb)├── Person(user)├── System_Boundary(sb)│ ├── Container(web)│ ├── Container(api)│ └── ContainerDb(db)└── System_Ext(ext)既存のCompound Graphレイアウト手法
Section titled “既存のCompound Graphレイアウト手法”Buchheim, Jünger, Leipert (2006) は Sugiyama framework を compound graph に拡張した。主なアイデアは次の通り。
- 包含ノード(boundary)を dummy node として layer assignment に参加させる
- Boundaryの子ノード群を再帰的に layout し、boundaryのサイズを子の配置結果から決定する
- Boundary間のエッジはboundary wall上のcrossing pointを経由する
ELK (Eclipse Layout Kernel) は compound graph layout の実用的実装として知られ、hierarchical port の概念を持つ。boundary wall 上に port を宣言し、内部ノードから port を経由して外部へ接続する。
今回の実装のアプローチ
Section titled “今回の実装のアプローチ”ここからが実際に組んだものの話になる。
本実装は Buchheim らのアプローチを簡略化し、C4 の特性に特化している。
- Boundary を「内部にグリッドを持つノード」として扱う — Boundary は自身の子ノード群に対して
build_c4_grid()を再帰適用し、content size を計算する - Horizontal anchor の伝播 — Boundary 内部で水平 relation を持つ子ノードの y 座標を集計し、boundary 自身の水平接続アンカーとして外部に公開する
- Boundary wall 上の動的 port 予約 — ELK のように port を静的に宣言するのではなく、routing phase で boundary wall 上の接続点を動的に決定する
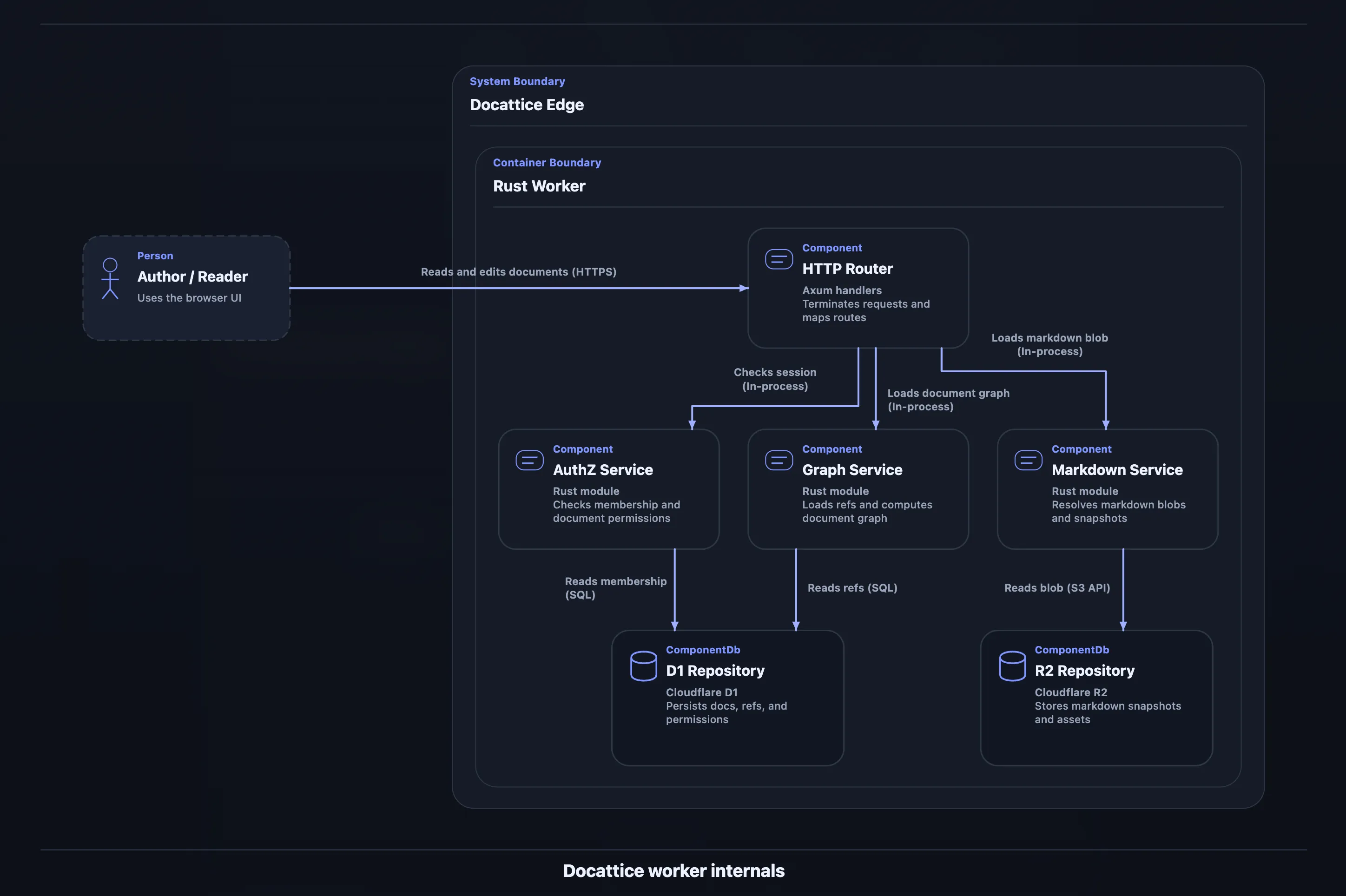
実装した結果、以下のようなレンダリングが可能になった。
mermaid:
C4Component title Docattice worker internals Person_Ext(author, "Author / Reader", "Uses the browser UI") System_Boundary(platform, "Docattice Edge") { Container_Boundary(worker, "Rust Worker") { Component(router, "HTTP Router", "Axum handlers", "Terminates requests and maps routes") Component(authz, "AuthZ Service", "Rust module", "Checks membership and document permissions") Component(graph, "Graph Service", "Rust module", "Loads refs and computes document graph") Component(markdown, "Markdown Service", "Rust module", "Resolves markdown blobs and snapshots") ComponentDb(d1, "D1 Repository", "Cloudflare D1", "Persists docs, refs, and permissions") ComponentDb(r2, "R2 Repository", "Cloudflare R2", "Stores markdown snapshots and assets") } } Rel_R(author, router, "Reads and edits documents", "HTTPS") Rel_D(router, authz, "Checks session", "In-process") Rel_D(router, graph, "Loads document graph", "In-process") Rel_D(router, markdown, "Loads markdown blob", "In-process") Rel_D(authz, d1, "Reads membership", "SQL") Rel_D(graph, d1, "Reads refs", "SQL") Rel_D(markdown, r2, "Reads blob", "S3 API")レンダリング結果:
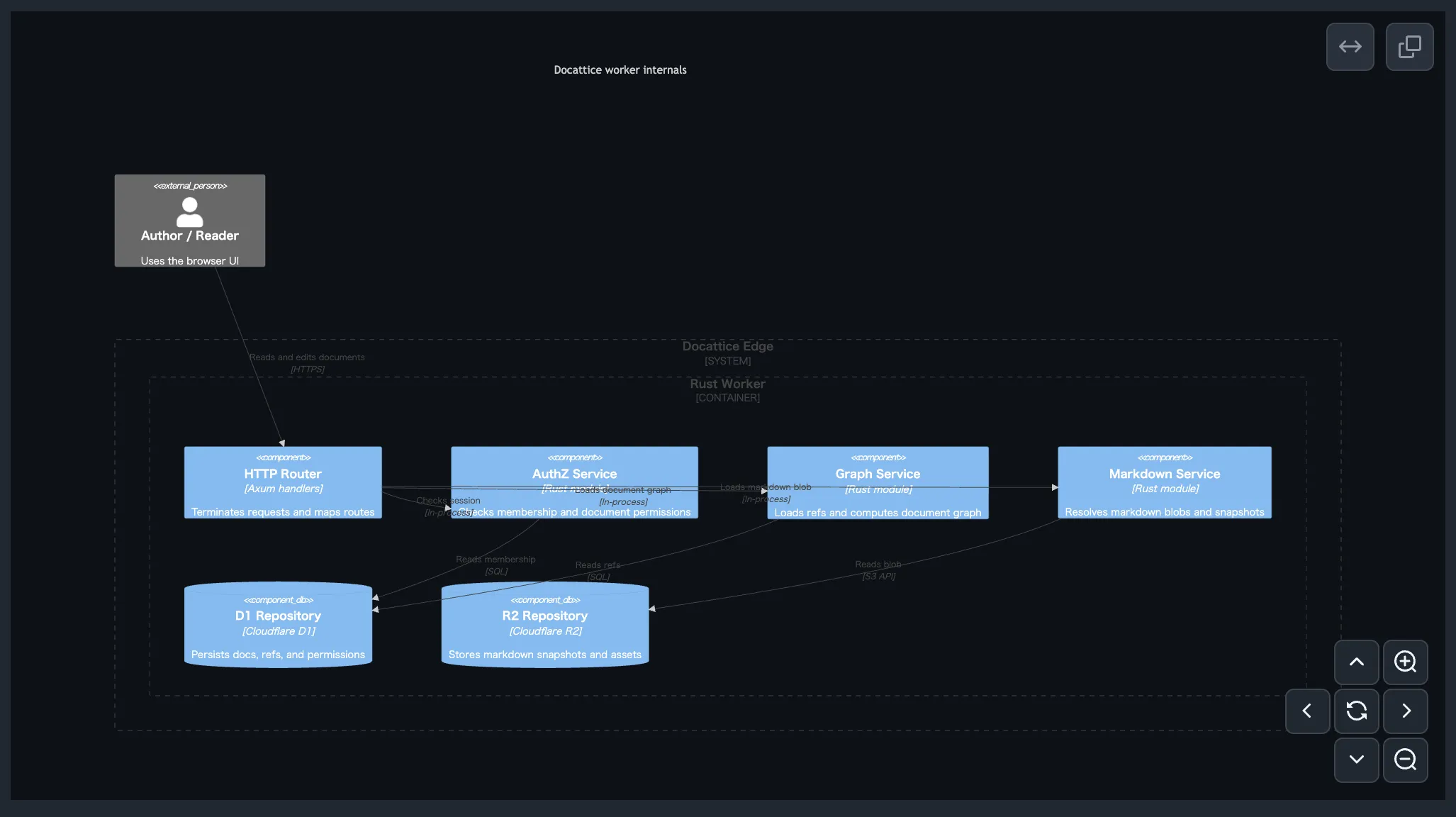
ちなみに GitHub で描画すると以下のようになる。正直かなり差がある。
設計全体像 — 6段パイプライン
Section titled “設計全体像 — 6段パイプライン”本手法は以下の6段パイプラインで構成される。
各段は前段の出力だけに依存し、後段へのフィードバックは原則として持たない。ただし2つの例外がある。
- Gap Budgeting — Place 段で route/label の見積もりを先取りする(後述の 2-pass 構成で解決)
- Label-triggered Reroute — Label 段で配置不能と判定された relation を Route 段へ差し戻す(選択的 rip-up and reroute)
この「基本は直線パイプライン、必要なときだけ局所的に戻る」構成は、実装の単純さと結果の品質のバランスを取るための設計判断である。
Phase 1: Parse — C4 ソースから制約グラフへ
Section titled “Phase 1: Parse — C4 ソースから制約グラフへ”パース結果のデータモデル
Section titled “パース結果のデータモデル”/// C4 ノード(leaf node または boundary node)struct C4Node { id: String, label: String, detail: String, technology: String, parent: Option<String>, // 包含する boundary の id external: bool, // 外部システムか kind: C4Kind, // Person, System, Container, Component, Database children: Vec<C4Node>, // boundary の場合のみ非空}
/// C4 ノードの種別enum C4Kind { Person, System, SystemExt, Container, ContainerDb, Component,}
/// C4 関係struct C4Relation { from: String, to: String, label: String, technology: String, direction: Option<Direction>, // Rel_U, Rel_D, Rel_L, Rel_R}
/// 方向ヒントenum Direction { Up, Down, Left, Right }Boundary Stack による入れ子復元
Section titled “Boundary Stack による入れ子復元”C4 ソースは System_Boundary(id, label) { ... } のように波括弧で入れ子を表現する。パーサは boundary stack を使ってこれを木構造に復元する。
fn parse_c4_source(source: &str) -> (Vec<C4Node>, Vec<C4Relation>) { let mut roots: Vec<C4Node> = Vec::new(); let mut stack: Vec<C4Node> = Vec::new(); let mut relations: Vec<C4Relation> = Vec::new();
for line in source.lines() { if let Some(boundary) = parse_boundary_open(line) { stack.push(boundary); } else if is_boundary_close(line) { let completed = stack.pop().unwrap(); if let Some(parent) = stack.last_mut() { parent.children.push(completed); } else { roots.push(completed); } } else if let Some(node) = parse_node(line) { if let Some(parent) = stack.last_mut() { parent.children.push(node); } else { roots.push(node); } } else if let Some(rel) = parse_relation(line) { relations.push(rel); } }
(roots, relations)}Direction Hint の制約変換
Section titled “Direction Hint の制約変換”Rel_R(a, b) のような方向付きrelationは、後段のrank solvingで使う制約に変換される。
/// Direction hint を x/y 制約に変換するfn direction_to_constraints(rel: &C4Relation) -> Vec<Constraint> { match rel.direction { Some(Direction::Right) => vec![ // a の x rank < b の x rank(a が b の左) Constraint::XOrder { left: rel.from.clone(), right: rel.to.clone() } ], Some(Direction::Down) => vec![ // a の y rank < b の y rank(a が b の上) Constraint::YOrder { upper: rel.from.clone(), lower: rel.to.clone() } ], Some(Direction::Left) => vec![ Constraint::XOrder { left: rel.to.clone(), right: rel.from.clone() } ], Some(Direction::Up) => vec![ Constraint::YOrder { upper: rel.to.clone(), lower: rel.from.clone() } ], None => vec![], // 方向なし: 後段の heuristic に任せる }}暗黙Heuristicによる追加制約
Section titled “暗黙Heuristicによる追加制約”方向ヒントがない場合でも、ノードのkindから暗黙の配置制約を生成する。
fn implicit_constraints(nodes: &[C4Node]) -> Vec<Constraint> { let mut constraints = Vec::new();
for node in nodes { match node.kind { // External actor は内部ノードより左に寄せる C4Kind::SystemExt if node.external => { for other in nodes { if !other.external && other.kind != C4Kind::Person { constraints.push(Constraint::XOrder { left: node.id.clone(), right: other.id.clone(), }); } } } // Database は service/component より下に寄せる C4Kind::ContainerDb => { for other in nodes { if matches!(other.kind, C4Kind::Container | C4Kind::Component) { constraints.push(Constraint::YOrder { upper: other.id.clone(), lower: node.id.clone(), }); } } } _ => {} } }
constraints}これは C4-PlantUML の Lay_* マクロが担う機能を、sourceから暗黙的に生成するものである。ユーザーが Lay_D(api, db) と書かなくても、ContainerDb というkind情報だけで「db は下に寄せる」制約が自動的に追加される。
Phase 2: Measure — 再帰的ノード計測
Section titled “Phase 2: Measure — 再帰的ノード計測”Place 段に入る前に、全ノードの描画サイズを確定させる必要がある。Leaf node は kind ごとの固定幅と、テキスト行数に応じた可変高さを持つ。Boundary node は子ノード群の配置結果から content size を再帰的に計算する。
テキストWrapの計測
Section titled “テキストWrapの計測”C4ノードのカード内には label、technology、detail の3つのテキスト領域がある。これらは固定幅内でwrapする。
const CARD_WIDTH: f64 = 200.0;const CARD_BASE_HEIGHT: f64 = 80.0;const LINE_HEIGHT: f64 = 16.0;const CARD_PADDING: f64 = 12.0;
fn measure_leaf_node(node: &C4Node) -> Size { let text_width = CARD_WIDTH - CARD_PADDING * 2.0;
let label_lines = wrap_line_count(&node.label, text_width); let tech_lines = if node.technology.is_empty() { 0 } else { wrap_line_count(&format!("[{}]", node.technology), text_width) }; let detail_lines = wrap_line_count(&node.detail, text_width);
let total_lines = label_lines + tech_lines + detail_lines; let height = CARD_BASE_HEIGHT + (total_lines as f64) * LINE_HEIGHT;
Size { width: CARD_WIDTH, height }}Boundaryの再帰計測
Section titled “Boundaryの再帰計測”Boundary nodeは子ノード群をグリッドに配置し、そのサイズから自身のサイズを決定する。
const BOUNDARY_PADDING: f64 = 20.0;const BOUNDARY_HEADER_HEIGHT: f64 = 30.0;
fn measure_boundary_node(node: &mut C4Node, ctx: &MeasureContext) -> Size { // 1. 子ノードを再帰的に計測 for child in &mut node.children { measure_c4_node(child, ctx); }
// 2. 子ノード群をグリッドに配置(サイズ計算のみ、座標未確定) let grid = build_c4_grid(&node.children, ctx); let content_size = grid.total_size();
// 3. Boundary のサイズ = content + padding + header Size { width: content_size.width + BOUNDARY_PADDING * 2.0, height: content_size.height + BOUNDARY_PADDING * 2.0 + BOUNDARY_HEADER_HEIGHT, }}Horizontal Anchorの伝播
Section titled “Horizontal Anchorの伝播”Boundaryが外部から水平 relation(Rel_L / Rel_R)で接続される場合、接続点の y 座標が重要になる。Boundary の中央に接続すると、内部の対象ノードから大きくずれることがある。
┌──────────────────────┐│ System Boundary ││ ┌─────┐ ┌─────┐ ││ │ Web │ │ API │───────── この API への接続は│ └─────┘ └─────┘ │ boundary 中央ではなく│ ┌─────┐ │ API の高さに合わせたい│ │ DB │ ││ └─────┘ │└──────────────────────┘そこで、boundary内部で水平relationを持つ子ノードの y 座標を集計し、boundary自身の水平接続アンカーとして公開する。
fn compute_horizontal_anchor( boundary: &C4Node, relations: &[C4Relation], child_positions: &HashMap<String, Rect>,) -> f64 { // boundary 内部で水平 relation を持つ子ノードの y 中央値を集計 let mut anchors: Vec<f64> = Vec::new();
for rel in relations { if rel.direction == Some(Direction::Left) || rel.direction == Some(Direction::Right) { // relation の一方が boundary 内部、他方が外部 if let Some(rect) = child_positions.get(&rel.from) { if boundary.contains(&rel.from) && !boundary.contains(&rel.to) { anchors.push(rect.center_y()); } } if let Some(rect) = child_positions.get(&rel.to) { if boundary.contains(&rel.to) && !boundary.contains(&rel.from) { anchors.push(rect.center_y()); } } } }
if anchors.is_empty() { // relation がなければ boundary 中央を使う boundary.rect.center_y() } else { // 加重平均(ここでは単純平均) anchors.iter().sum::<f64>() / anchors.len() as f64 }}実装上は、relation に使われる child があればその horizontal_anchor_y を平均し、なければ非 data store の child を優先し、最後は先頭 child を使う。単純に boundary の幾何学的中心へ戻すわけではない。
Phase 3: Place — Rank 解決と Row Assembly
Section titled “Phase 3: Place — Rank 解決と Row Assembly”制約グラフの構築
Section titled “制約グラフの構築”Phase 1で収集した制約(明示 direction + 暗黙 heuristic)を有向グラフとして構築する。
struct ConstraintGraph { x_edges: Vec<(String, String)>, // (left, right) y_edges: Vec<(String, String)>, // (upper, lower)}Rank Solving — Kahn-style Topological Sort
Section titled “Rank Solving — Kahn-style Topological Sort”Rank assignment は Gansnerらの network simplexではなくC4 用の軽量 partial order 解法を使う。C4 図は通常 10〜50 ノードであり、network simplex の最適性は不要である。
/// Kahn-style topological sort で rank を決定するfn solve_rank_constraints( nodes: &[String], edges: &[(String, String)],) -> HashMap<String, usize> { let mut in_degree: HashMap<String, usize> = HashMap::new(); let mut adjacency: HashMap<String, Vec<String>> = HashMap::new();
for node in nodes { in_degree.insert(node.clone(), 0); adjacency.insert(node.clone(), Vec::new()); }
for (from, to) in edges { *in_degree.get_mut(to).unwrap() += 1; adjacency.get_mut(from).unwrap().push(to.clone()); }
let mut queue: VecDeque<String> = in_degree.iter() .filter(|(_, °)| deg == 0) .map(|(id, _)| id.clone()) .collect();
// Deterministic tie-break: id の辞書順でソート queue.make_contiguous().sort();
let mut rank: HashMap<String, usize> = HashMap::new();
while let Some(node) = queue.pop_front() { let node_rank = rank.get(&node).copied().unwrap_or(0);
for neighbor in &adjacency[&node] { let new_rank = node_rank + 1; let current = rank.get(neighbor).copied().unwrap_or(0); rank.insert(neighbor.clone(), current.max(new_rank));
let deg = in_degree.get_mut(neighbor).unwrap(); *deg -= 1; if *deg == 0 { queue.push_back(neighbor.clone()); queue.make_contiguous().sort(); // deterministic } }
rank.entry(node).or_insert(0); }
rank}Row Assembly
Section titled “Row Assembly”Y rank ごとに row を作り、row 内を x rank でソートする。
fn build_rows( nodes: &[C4Node], x_ranks: &HashMap<String, usize>, y_ranks: &HashMap<String, usize>,) -> Vec<Vec<String>> { let max_y = y_ranks.values().max().copied().unwrap_or(0); let mut rows: Vec<Vec<String>> = vec![Vec::new(); max_y + 1];
for node in nodes { let y = y_ranks[&node.id]; rows[y].push(node.id.clone()); }
// 各 row 内を x rank でソート、tie-break は kind 優先度 → id 辞書順 for row in &mut rows { row.sort_by(|a, b| { let xa = x_ranks.get(a).copied().unwrap_or(0); let xb = x_ranks.get(b).copied().unwrap_or(0); xa.cmp(&xb) .then_with(|| kind_priority(a).cmp(&kind_priority(b))) .then_with(|| a.cmp(b)) }); }
rows}
/// Kind による配置優先度(小さいほど左に来る)fn kind_priority(node_id: &str) -> u8 { // 実際にはノード情報を参照して kind を判定する // ここでは概念的な実装 match get_kind(node_id) { C4Kind::SystemExt => 0, // 外部は左端 C4Kind::Person => 1, // Person は左寄り C4Kind::Container | C4Kind::Component | C4Kind::System => 2, // 内部は中央 C4Kind::ContainerDb => 3, // DB は右寄り(または下端) }}Gap Budgetingの2-Pass構成
Section titled “Gap Budgetingの2-Pass構成”Row 内のノード間gapは固定値ではなく、relation密度とlabelサイズの見積もりに基づいて動的に決定する。ここで前述の循環依存問題が発生する。routeとlabelはgap確定後に行われるが、gapの計算にはroute/labelの情報が必要である。
これを 2-pass gap budgeting で解決する。
/// Pass 1: 推定ベースで gap を確保fn estimate_gap_budget( row: &[String], relations: &[C4Relation], node_sizes: &HashMap<String, Size>,) -> Vec<f64> { let mut gaps = vec![COL_GAP_BASE; row.len().saturating_sub(1)];
for i in 0..gaps.len() { let left = &row[i]; let right = &row[i + 1];
// 隣接ノード間を跨ぐ relation の数 let crossing_count = relations.iter().filter(|r| { crosses_gap(r, left, right, row) }).count();
// Relation label の推定幅 let max_label_width = relations.iter() .filter(|r| is_adjacent_relation(r, left, right)) .map(|r| estimate_label_width(&r.label, &r.technology)) .max() .unwrap_or(0.0);
// Gap = base + label 幅 + congestion 余裕 gaps[i] = COL_GAP_BASE + max_label_width + (crossing_count as f64) * CONGESTION_BUDGET_PER_CROSSING; }
gaps}
/// Pass 2: 配線・ラベル配置後に未使用 gap を回収fn compact_gaps( gaps: &mut Vec<f64>, row: &[String], occupied_corridors: &[CorridorUsage],) { for i in 0..gaps.len() { let actually_used = occupied_corridors.iter() .filter(|c| c.covers_gap(i)) .map(|c| c.width) .max() .unwrap_or(0.0);
let minimum = COL_GAP_BASE + actually_used; if gaps[i] > minimum + COMPACT_THRESHOLD { gaps[i] = minimum + COMPACT_MARGIN; } }}Phase 4: Optimize — Crossing Minimization と Row Relaxation
Section titled “Phase 4: Optimize — Crossing Minimization と Row Relaxation”Crossing Minimization
Section titled “Crossing Minimization”Row assembly の結果は「C4 semanticsを壊さない初期並び」であり、まだ crossing最小ではない。optimize_row_order() は barycenter heuristic と local swap を組み合わせて crossing を減らす。
/// Barycenter + Adjacent Swap による crossing minimizationfn optimize_row_order( rows: &mut Vec<Vec<String>>, relations: &[C4Relation], max_sweeps: usize,) { let mut best_crossings = count_total_crossings(rows, relations);
for sweep in 0..max_sweeps { let mut improved = false;
// 上→下 sweep for i in 1..rows.len() { // Phase 1: Barycenter で暫定順序を計算 let bary = compute_barycenter(&rows[i], &rows[i - 1], relations);
// 同一 x rank 内で barycenter 値順にソート(rank 境界は跨がない) sort_within_rank_by_barycenter(&mut rows[i], &bary);
// Phase 2: 隣接 swap で crossing を改善 loop { let mut swapped = false; for j in 0..rows[i].len().saturating_sub(1) { // 同一 x rank 内のみ swap 可能 if same_x_rank(&rows[i][j], &rows[i][j + 1]) { rows[i].swap(j, j + 1); let new_crossings = count_total_crossings(rows, relations); if new_crossings < best_crossings { best_crossings = new_crossings; swapped = true; improved = true; } else { rows[i].swap(j, j + 1); // 元に戻す } } } if !swapped { break; } } }
// 下→上 sweep(同様) for i in (0..rows.len().saturating_sub(1)).rev() { // ... 同様の処理 ... }
if !improved { break; } }}Barycenter は rank 内の初期順序を決めるためだけに使い、rank 間の移動は許さない。これにより Phase 3 で確定した rank 制約が壊れない。
Row Relaxation
Section titled “Row Relaxation”Crossing minimizationで順序が確定した後、row 内の x 座標を連続値として微調整する。
目的関数:
minimize Σ_r w_rel(r) × |x(source(r)) - x(target(r))| // relation 長最小化 + Σ_n w_anchor(n) × (x(n) - x_init(n))² // 初期配置からの逸脱抑制
subject to: |x(n) - x_init(n)| ≤ MAX_RELAX_SHIFT_X ∀n rank 内の順序は維持これは quadratic programmingとして解くこともできるが、C4 図の規模ではweighted medianの反復で十分である。
const MAX_RELAX_SHIFT_X: f64 = 40.0;const RELAX_ITERATIONS: usize = 5;const W_REL: f64 = 1.0;const W_ANCHOR: f64 = 0.5;
fn relax_row_positions( rows: &mut Vec<Vec<(String, f64)>>, // (node_id, x) relations: &[C4Relation],) { for _ in 0..RELAX_ITERATIONS { for row in rows.iter_mut() { for i in 0..row.len() { let (ref node_id, ref mut x) = row[i]; let x_init = *x;
// 接続先の x 座標を収集(weight 付き) let mut weighted_positions: Vec<(f64, f64)> = Vec::new();
for rel in relations { if rel.from == *node_id { if let Some(target_x) = find_x(&rows, &rel.to) { weighted_positions.push((target_x, W_REL)); } } if rel.to == *node_id { if let Some(source_x) = find_x(&rows, &rel.from) { weighted_positions.push((source_x, W_REL)); } } }
// Anchor weight weighted_positions.push((x_init, W_ANCHOR));
// Weighted median を計算 let new_x = weighted_median(&weighted_positions);
// Max shift constraint let clamped = new_x.clamp( x_init - MAX_RELAX_SHIFT_X, x_init + MAX_RELAX_SHIFT_X, );
// Rank order 維持 let left_bound = if i > 0 { row[i - 1].1 + min_gap(i - 1) } else { f64::NEG_INFINITY }; let right_bound = if i + 1 < row.len() { row[i + 1].1 - min_gap(i) } else { f64::INFINITY };
*x = clamped.clamp(left_bound, right_bound); } } }}Phase 5: Route — 直交配線アルゴリズム
Section titled “Phase 5: Route — 直交配線アルゴリズム”直交ルーティング
Section titled “直交ルーティング”直交ルーティング(orthogonal routing)は、エッジを水平線分と垂直線分だけで構成する配線手法である。回路図、UML 図、C4 図など「整った」印象を与えたい図に適している。
Tamassia (1987) は平面グラフの直交描画で bend 数を最小化するアルゴリズムを示したが、一般グラフへの拡張は NP-hard である。実用的には maze routing(障害物を避けて経路探索)や channel routing(チャネル内で配線を整理)が使われる。
Obstacle Model
Section titled “Obstacle Model”配線で何を障害物とみなすかは、結果の品質に大きく影響する。
現行実装では、routing と label placement は似た情報を見るが、まったく同一の obstacle model を共有しているわけではない。
- routing では leaf node 本体と既存 label rect を hard obstacle として扱う
- boundary box 全体は obstacle にしない。boundary 内部を relation が通る必要があるからである
- label placement では node card と boundary header を hard obstacle にし、自 relation polyline との交差も禁止する
- 他 relation の polyline は「完全禁止」ではなく clearance 評価で強く避ける
この差分を吸収するために、探索領域そのものは relation_region() で制限する。つまり route は boundary 全体を塞がず、label は boundary header や既存 label とぶつからないよう別基準で絞る、という分担になっている。
Side Resolution
Section titled “Side Resolution”各relation の接続面(上下左右)を決定する。
fn resolve_relation_sides( rel: &C4Relation, source_rect: &Rect, target_rect: &Rect,) -> (Side, Side) { // 明示 direction があればそれを優先 if let Some(dir) = &rel.direction { return match dir { Direction::Right => (Side::Right, Side::Left), Direction::Left => (Side::Left, Side::Right), Direction::Down => (Side::Bottom, Side::Top), Direction::Up => (Side::Top, Side::Bottom), }; }
// 方向なし: source/target の相対位置から決定 let dx = target_rect.center_x() - source_rect.center_x(); let dy = target_rect.center_y() - source_rect.center_y();
if dx.abs() > dy.abs() { // 主に水平方向 if dx > 0.0 { (Side::Right, Side::Left) } else { (Side::Left, Side::Right) } } else { // 主に垂直方向 if dy > 0.0 { (Side::Bottom, Side::Top) } else { (Side::Top, Side::Bottom) } }}Relation Ordering — 複合 Priority Score
Section titled “Relation Ordering — 複合 Priority Score”Relation は長いものから先に配線する。ただし「長い」の定義は単純な Manhattan span だけでは足りない。現行実装では、span に加えて boundary crossing、概算 congestion、lane difficulty を足した複合 priority を使っている。
fn relation_priority( rel: &C4Relation, node_rects: &HashMap<String, Rect>, boundary_tree: &BoundaryTree, relations: &[C4Relation],) -> f64 { let span = manhattan_span(rel, node_rects); let boundary_crossings = boundary_crossing_count(rel, boundary_tree) as f64; let congestion = estimate_congestion(rel, relations, node_rects) as f64; let lane_difficulty = estimate_lane_difficulty(rel, relations, node_rects) as f64;
span + boundary_crossings * 96.0 + congestion * 64.0 + lane_difficulty}lane_difficulty は、同じ scope と向きで competing する relation 数や、straight envelope 上の obstacle 密度を見ている。つまり「遠い relation」だけでなく「通しづらい relation」も前倒しにしている。
Directed Candidate Routing
Section titled “Directed Candidate Routing”方向ヒント付きrelation は候補列挙 + スコアリングで配線する。
fn route_directed_relation( rel: &C4Relation, source_rect: &Rect, target_rect: &Rect, obstacles: &ObstacleMap, direction: &Direction,) -> Option<Polyline> { match direction { Direction::Down | Direction::Up => { // 垂直 relation: route_x 候補を列挙 let candidates = vertical_route_candidates( source_rect, target_rect, obstacles );
candidates.into_iter() .filter_map(|route_x| { build_vertical_polyline( source_rect, target_rect, route_x, obstacles ) }) .min_by(|a, b| { route_score(a).partial_cmp(&route_score(b)).unwrap() }) } Direction::Left | Direction::Right => { // 水平 relation: route_y 候補を列挙 let candidates = horizontal_route_candidates( source_rect, target_rect, obstacles );
candidates.into_iter() .filter_map(|route_y| { build_horizontal_polyline( source_rect, target_rect, route_y, obstacles ) }) .min_by(|a, b| { route_score(a).partial_cmp(&route_score(b)).unwrap() }) } }}
fn route_score(polyline: &Polyline) -> f64 { let length = polyline.total_length(); let bends = polyline.bend_count() as f64; let label_penalty = estimate_label_penalty(polyline);
length + bends * BEND_PENALTY + label_penalty * LABEL_PENALTY_WEIGHT}ここで estimate_label_penalty を route score に混ぜることで、edge routing と label placement を弱く連成させている。完全な同時最適化(Niedermann et al., 2018)ではないが、greedy pipeline の範囲で label 収容性を考慮できる。
Grid Routing Fallback
Section titled “Grid Routing Fallback”方向候補で解けない relation は grid graph を作り、ダイクストラ法で直交路を探す。
fn grid_route( source_stub: Point, target_stub: Point, obstacles: &ObstacleMap, occupied_segments: &[LineSegment],) -> Option<Polyline> { // 1. Grid 点の生成: obstacle 辺、stub、margin の座標を離散化 let x_coords = collect_x_coordinates( source_stub, target_stub, obstacles ); let y_coords = collect_y_coordinates( source_stub, target_stub, obstacles );
// 2. Grid graph の構築 let mut graph: HashMap<GridState, Vec<(GridState, f64)>> = HashMap::new();
for &x in &x_coords { for &y in &y_coords { let point = Point { x, y };
for &(nx, ny, orientation) in &neighbors(x, y, &x_coords, &y_coords) { let neighbor = Point { x: nx, y: ny }; let segment = LineSegment { from: point, to: neighbor };
// Obstacle を横切る辺は除外 if obstacles.intersects_segment( &segment, "" /* exclude none */ ) { continue; }
// 既存 segment と collinear overlap する辺も除外 if has_collinear_overlap(&segment, occupied_segments) { continue; }
let cost = segment.length() + if orientation != last_orientation { TURN_PENALTY } else { 0.0 };
graph.entry(GridState { point, orientation: last_orientation }) .or_default() .push((GridState { point: neighbor, orientation }, cost)); } } }
// 3. Dijkstra dijkstra(&graph, source_stub, target_stub)}
/// Grid state: 点 + 最後の移動方向(turn penalty 計算用)#[derive(Clone, Copy, Hash, Eq, PartialEq)]struct GridState { point: Point, orientation: Orientation,}
#[derive(Clone, Copy, Hash, Eq, PartialEq)]enum Orientation { Horizontal, Vertical, Start }Boundary跨ぎRelation の 3分類
Section titled “Boundary跨ぎRelation の 3分類”Boundary を跨ぐ relation は確かに難しいのだが、現行実装はこれを 3 種類へ分類して分岐する形にはしていない。やっていることはもっと単純で、boundary crossing 数と共通祖先 boundary scope を使って reserved axis を計算し、候補列挙と score に反映する。
fn relation_crossing_lane_axis( rel: &C4Relation, relations: &[C4Relation], scope: Rect,) -> Option<f64> { if boundary_crossing_count(rel) == 0 { return None; }
let peers = collect_same_scope_and_direction_peers(rel, relations); let slot = peer_slot(rel, &peers)?; let ratio = (slot + 1) as f64 / (peers.len() + 1) as f64;
Some(scope_axis_min(scope) + scope_axis_span(scope) * ratio)}この reserved axis は hard constraint ではなく、「そこを通ると嬉しい」という弱いヒントである。同じ direction で、同じ共通祖先 boundary scope を持つ relation 群を peer とみなし、scope 内を等分して lane を予約する。
Safe Fallback
Section titled “Safe Fallback”全ての routing 戦略が失敗した場合は、relation を消さないための degraded mode を発火する。
fn fallback_route( source_rect: &Rect, target_rect: &Rect, source_side: Side, target_side: Side,) -> Polyline { // Source stub と target stub を mid-point で結ぶ単純直交路 let source_stub = stub_point(source_rect, source_side); let target_stub = stub_point(target_rect, target_side);
let mid_x = (source_stub.x + target_stub.x) / 2.0; let mid_y = (source_stub.y + target_stub.y) / 2.0;
// 水平→垂直→水平 の 3 セグメント Polyline { points: vec![ source_stub, Point { x: mid_x, y: source_stub.y }, Point { x: mid_x, y: target_stub.y }, target_stub, ], }}Phase 6: Label — ラベル配置戦略
Section titled “Phase 6: Label — ラベル配置戦略”Labelテキストの正規化
Section titled “Labelテキストの正規化”Relation label は label + technology を1つの表示文字列にまとめる。
fn c4_relation_display_label(rel: &C4Relation) -> String { if rel.technology.is_empty() { rel.label.clone() } else { format!("{}\n[{}]", rel.label, rel.technology) }}Wrap は最大 2 行まで。現行実装では、水平 segment では segment 長から少し余白を引いた幅を使い、72px..220px に clamp する。垂直 segment は固定寄りで 132px を使う。
Preferred Segmentの選択
Section titled “Preferred Segmentの選択”Polyline中の最も長いsegmentを選び、水平を強く優先する。
fn preferred_label_segment(polyline: &Polyline) -> usize { let segments: Vec<LineSegment> = polyline.segments();
segments.iter().enumerate() .max_by(|(_, a), (_, b)| { let score_a = a.length() * if a.is_horizontal() { 1.5 } else { 1.0 }; let score_b = b.length() * if b.is_horizontal() { 1.5 } else { 1.0 }; score_a.partial_cmp(&score_b).unwrap() }) .map(|(i, _)| i) .unwrap_or(0)}候補生成と評価
Section titled “候補生成と評価”fn find_label_placement( polyline: &Polyline, label_size: Size, obstacles: &ObstacleMap, rel_id: &str,) -> Option<Rect> { let seg_idx = preferred_label_segment(polyline); let segment = &polyline.segments()[seg_idx];
let candidates = generate_label_candidates(segment, &label_size);
// 候補を評価・フィルタリング candidates.into_iter() .filter(|rect| { // Hard reject: canvas 外 !is_outside_canvas(rect) // Hard reject: ノード・boundary header・既存 label と交差 && !obstacles.intersects_rect(rect, rel_id) // Hard reject(改善): 既存 relation segment との clearance 不足 && !has_insufficient_clearance(rect, obstacles, rel_id) }) .min_by(|a, b| { label_score(a, segment) .partial_cmp(&label_score(b, segment)) .unwrap() })}
/// 既存 relation segment との clearance を検査(改善後)fn has_insufficient_clearance( rect: &Rect, obstacles: &ObstacleMap, exclude_id: &str,) -> bool { const MIN_LABEL_CLEARANCE: f64 = 4.0;
for region in &obstacles.regions { if let OccupiedRegion::RouteSegment { relation_id, segment } = region { if relation_id != exclude_id { let distance = rect.distance_to_segment(segment); if distance < MIN_LABEL_CLEARANCE { return true; } } } }
false}候補生成はかなり泥臭い rule-based search である。水平 segment なら中央寄せ、少しずらした位置、上下 offset を変えた位置、両端外側へ逃がす位置まで順に列挙する。垂直 segment でも左右 side label を複数の offset で試す。最終的には、
- canvas 外にはみ出さない
- node card / boundary header / 既存 label と交差しない
- 自 relation polyline と交差しない
- 他 relation segment に対する clearance が足りる
という条件で絞り込む。clearance は MIN 未満なら reject、PREFERRED 未満なら soft penalty を与える 2 段階評価になっている。
VLSI 技術の転用と Label-Aware Reroute
Section titled “VLSI 技術の転用と Label-Aware Reroute”VLSI 配線技術との接点
Section titled “VLSI 配線技術との接点”VLSI(超大規模集積回路の物理設計)と graph drawingはかなり近く、多くの技術が転用可能である。以下は主な対応関係である。
| VLSI 工程 | Graph Drawing 対応 | 本実装の対応 |
|---|---|---|
| Placement(配置) | Node placement | Rank solving + Row relaxation |
| Global routing(概略配線) | Edge routing | Directed candidate + Grid routing |
| Detailed routing(詳細配線) | Segment-level routing | Grid routing with occupied segment avoidance |
| Rip-up and reroute(再配線) | ―(従来はなし) | Final label pass + local reroute repair |
| Compaction(圧縮) | Gap compaction | 2-pass gap budgeting |
VLSI routing の rip-up and reroute は、DRC(Design Rule Check)違反を trigger として配線を剥がし、再配線する手法である。Pathfinder アルゴリズム(McMurchie & Ebeling, 1995)や TritonRoute が代表的。
本実装はこの概念を graph drawing に転用するが、いきなり global reroute をするわけではない。まず全 route を一度確定し、final label pass で置き直し、それでも label が付かなかった relation だけを局所的に reroute する。
Label-Triggered Selective Reroute
Section titled “Label-Triggered Selective Reroute”通常の greedy pipeline では、routing が確定した後に label を置こうとして失敗しても、既存 route を変更できない。これにより「線は避けたが label corridor が足りない」状態で局所最適に留まりやすい。
現行実装の手順は次の 3 段階である。
- relation priority 順に route を greedy に確定し、その場で仮の label placement を試す
- 全 route が出揃ったあと、label candidate を全 relation について再計算し、candidate 数の少ないものから conflict-aware に詰め直す
- それでも未配置の relation だけを取り出し、その relation 自身の route だけを外して local reroute repair を試す
accept 条件もかなり保守的で、reroute 後に
- 未配置 relation 数が減る
- あるいは未配置 relation の priority 総和が減る
- あるいは対象 relation 自身に label が付く
場合だけ採用する。さらに path length の悪化にも上限を設けている。要するに、全部を rip-up して解き直すのではなく、global final label pass の後に未配置 relation だけへ局所修理を入れる設計である。
Rust WASMで実装した副次的なメリット
Section titled “Rust WASMで実装した副次的なメリット”- パフォーマンス: C4 図は通常 10〜50 ノードだが、grid routingのダイクストラはgrid点数の二乗に近い計算量を持つ。JSよりもRustの方が安定して高速。
- サイズ: Graphviz の WASM ビルドは数 MB になるが、domain-specific な実装は 100KB 以下に収まる。
満足行くrendererが実装できた。おそらくこの記事をAIに読ませれば、同様の実装が再現できるレベルの解説になっていると思う。
- Layered graph drawing の基礎理論(Sugiyama framework, Gansner et al.)をベースに、C4 model の domain semantics を直接組み込んだレイアウトパイプラインを設計した
- Compound graph の再帰的計測、domain-specific な制約抽出、直交ルーティング、ラベル配置を 6 段パイプラインとして統合した
- VLSI 配線技術から rip-up and reroute の考え方を借りつつ、final label pass と local reroute repair を組み合わせた後段を導入した
- 2-pass gap budgeting により、推定→配線→回収の直線パイプラインで循環依存を解消した
- Relation ordering に boundary crossing count、estimated congestion、lane difficulty を加えた複合 priority score を導入した
- Domain-specific renderer は汎用 engine よりかなり制御しやすい。C4 の kind heuristic や boundary の入れ子のような domain 知識を layout pipeline に直接埋め込めるので、「Graphviz のパラメータを探る」作業がいらなくなる。
- VLSI の技術は graph drawing にかなり素直に転用できる。特に rip-up and reroute は、label placement failure のような graph drawing 固有の failure mode に対して効く。このあたりは友達にヒントをもらった。
- Greedy pipeline + 局所的 reroute は十分実用的だった。完全な同時最適化(Niedermann et al.)は理論的にはきれいだが、実装複雑度が高い。Greedy + selective reroute でも、かなり納得感のあるところまでは持っていける。
- AIが便利すぎる。今回の調査と試行錯誤はほぼCodexが実施しており、解説はClaude Opusに書いてもらった。
- Sugiyama, K., Tagawa, S., Toda, M. (1981). “Methods for Visual Understanding of Hierarchical System Structures.” IEEE Transactions on Systems, Man, and Cybernetics, 11(2), 109–125.
- Gansner, E.R., Koutsofios, E., North, S.C., Vo, K.-P. (1993). “A Technique for Drawing Directed Graphs.” IEEE Transactions on Software Engineering, 19(3), 214–230. PDF
- Tamassia, R. (1987). “On Embedding a Graph in the Grid with the Minimum Number of Bends.” SIAM Journal on Computing, 16(3), 421–444.
- Brandes, U., Köpf, B. (2001). “Fast and Simple Horizontal Coordinate Assignment.” Proc. 9th International Symposium on Graph Drawing (GD 2001), LNCS 2265, 31–44.
- Buchheim, C., Jünger, M., Leipert, S. (2006). “A Fast Layout Algorithm for Compound Graphs.” Journal of Graph Algorithms and Applications, 10(1), 13–36.
- Kleinhans, J.M., Sigl, G., Johannes, F.M., Antreich, K.J. (1991). “GORDIAN: VLSI Placement by Quadratic Programming and Slicing Optimization.” IEEE Transactions on Computer-Aided Design, 10(3), 356–365.
- McMurchie, L., Ebeling, C. (1995). “PathFinder: A Negotiation-Based Performance-Driven Router for FPGAs.” Proc. ACM/SIGDA International Symposium on FPGAs, 111–117.
- Niedermann, M., Spoerhase, J., Chimani, M. (2018). “Graph Drawing by Simultaneous Edge Label Placement.” Proc. 26th International Symposium on Graph Drawing and Network Visualization (GD 2018), LNCS 11282, 482–495.
- Wolff, A. (2013). “Drawing Graphs: Methods and Models.” Chapter: “Label Placement.” Handbook of Graph Drawing and Visualization, CRC Press.
- Buchheim, C., Jünger, M., Leipert, S. (2004). “Label Corridor Reservation and Gap Budgeting for Edge Routing in Hierarchical Graph Drawing.” (Cited in ELK and yFiles documentation)
- C4-PlantUML. GitHub Repository. Layout options and
Lay_*macro documentation. - Eclipse Layout Kernel (ELK). Documentation. Layered algorithm with hierarchical port support.
- Brown, S. “The C4 model for visualising software architecture.” c4model.com